Präzise Kontrolle während des Spurwechsels
Ausschlaggebend für das Erreichen dieses Meilensteins ist die Integration des IMU8.x.y Inertialsensors von Althen - einem Sensor, der für die präzise Steuerung des Hyperloop-Pods während des Spurwechselmanövers entscheidend ist.
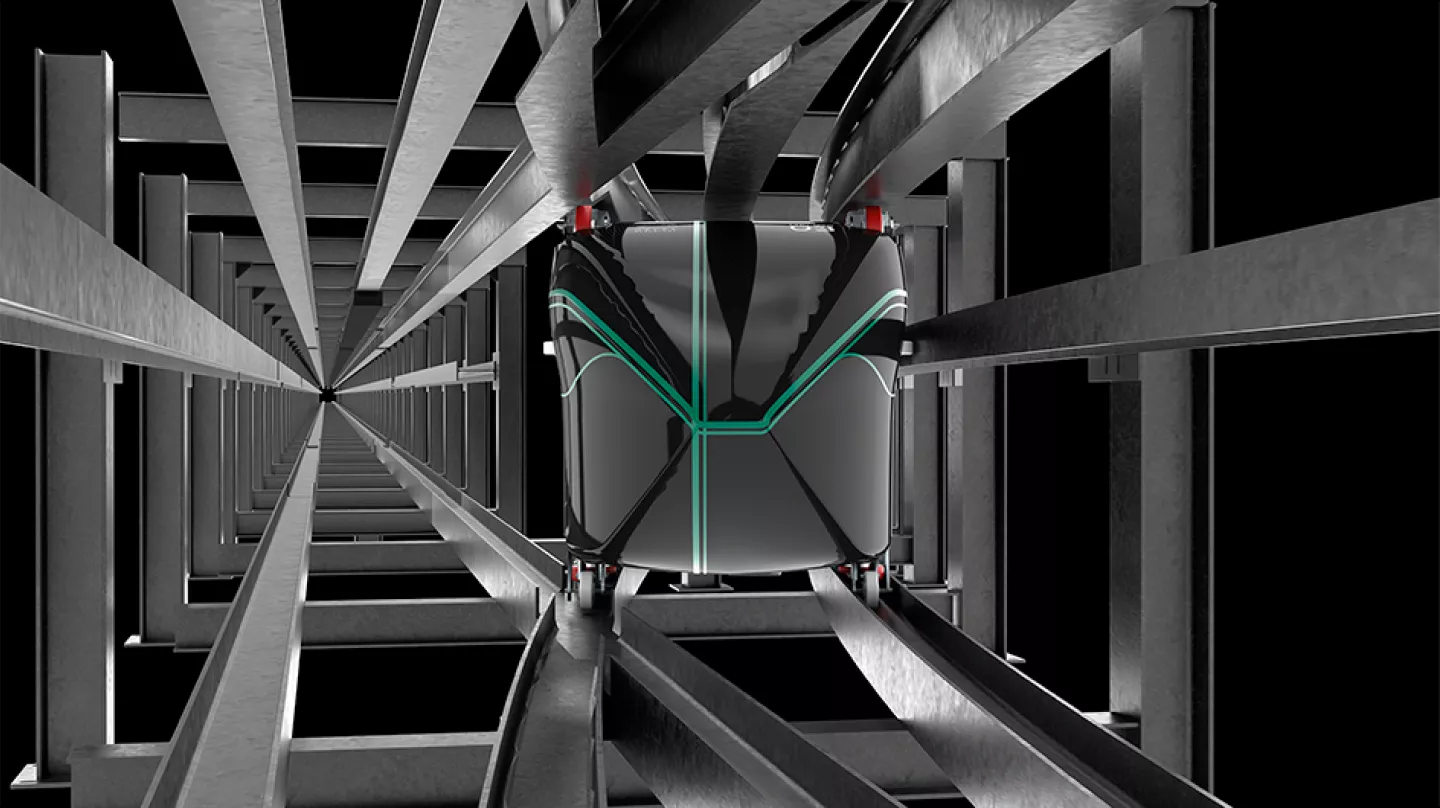
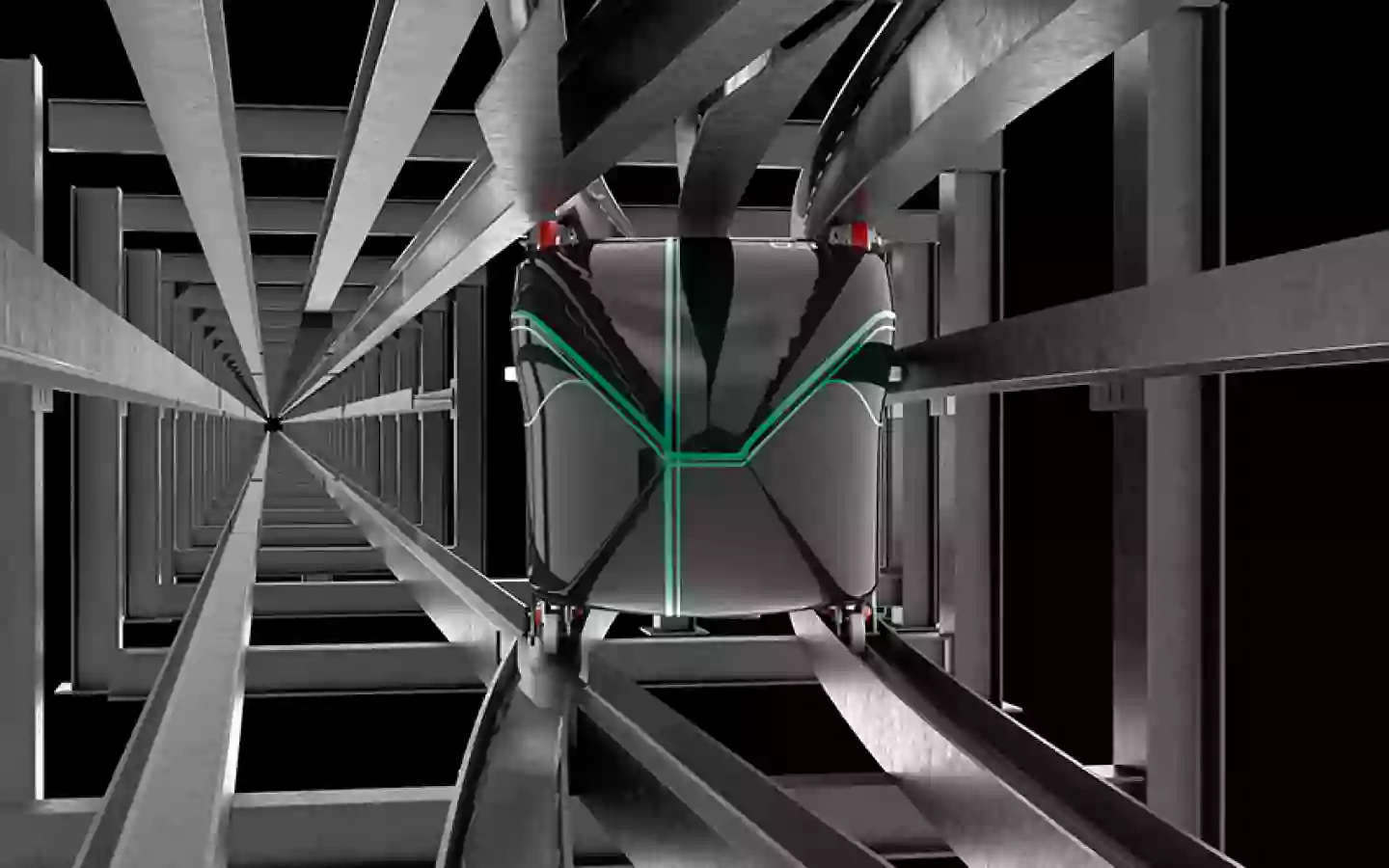
Während des Spurwechsels der Hyperloop-Pods ist die Steuerung und Stabilisierung von größter Bedeutung. Der Spurwechsel beinhaltet die Navigation durch einen Streckenabschnitt, in dem der Pod die Schwebeposition und die korrekte Ausrichtung beibehalten muss, während er seitliche und vertikale Träger kreuzt. Das übliche optische Lokalisierungssystem des Pods verliert in diesem Bereich an Leistungsfähigkeit und stellt eine Herausforderung für die Aufrechterhaltung der Stabilität und Kontrolle des Pods dar.
Über den ASC IMU 8.X.Y
Die ASC IMU 8.X.Y ist eine hochpräzise Inertialsensorik (IMU), die auf MEMS-Beschleunigungssensoren und -Gyroskopen basiert. Sie bietet 6 Genauigkeitsgrade, eine ausgezeichnete Bias-Stabilität und zeichnet sich durch geringes Rauschen und hohe Stoßfestigkeit aus. Das modulare Design unterstützt verschiedene Anwendungen, darunter fahrerlose Transportsysteme, Robotik und Eisenbahnsysteme. Mit seinem leichten, IP65-zertifizierten Aluminiumgehäuse und den anpassbaren Kabeloptionen bietet er zuverlässige Leistung unter rauen Bedingungen und ist damit ideal für Projekte, die eine präzise Positionierung und Navigation erfordern.
Der Schlüssel zum Erfolg
Um die Stabilität und Kontrolle des Pods aufrechtzuerhalten, wandte sich Delft Hyperloop an Althen und ASC. IMU8.x.y wurde integriert, um mehrere kritische Funktionen während des Spurwechsels zu erfüllen:
Präzise Pod-Lokalisierung
Das optische Lokalisierungssystem verliert die Kapsel während des Strahlübergangssegments "aus den Augen", so dass die IMU die Position der Kapsel bis zu 10 Sekunden lang mit einer Genauigkeit von 5 cm schätzen muss. Dadurch wird sichergestellt, dass der Pod in diesem entscheidenden Moment des Wechsels auf Kurs bleibt.
Überwachung der Pod-Ausrichtung
Die IMU erkennt und misst selbst die kleinsten Veränderungen in der Neigung, dem Gieren und dem Rollen des Pods. Diese Messungen sind entscheidend für die Aufrechterhaltung der Stabilität gegenüber den Trägern und gewährleisten, dass die Kapsel weiterhin gleichmäßig und ohne unerwartete Abweichungen schwebt.
Kraftabschätzung zur Dämpfung von Schwingungen
Die IMU spielt eine Schlüsselrolle bei der Schätzung der vertikalen Kraft, die vom Magnetmotor des Pods ausgeübt wird, und ermöglicht es dem Team, unerwünschte Schwingungen zu dämpfen, die während des Spurwechsels auftreten könnten. Dies ist entscheidend für die Aufrechterhaltung eines gleichmäßigen Schwebezustands und die Vermeidung von Störungen.
Schätzung der Zentrifugalkraft
Durch präzise Messungen der Zentrifugalkraft hilft die IMU bei der Bestimmung des optimalen Stroms, der während der Drehung verwendet werden muss, um sicherzustellen, dass der Pod den Spurwechsel sicher und effizient bewältigt.
Die Integration der IMU hat die Leistung des Pods bei der Bewältigung der seitlichen elektromagnetischen Aufhängungskräfte (EMS), die von mehreren komplexen Faktoren beeinflusst werden, erheblich verbessert. Die schnelle Reaktion der IMU ermöglichte es uns, unsere Steuerungssysteme zu verfeinern und uns auf das anspruchsvolle Spurwechselmanöver vorzubereiten.

Integration von Signalverarbeitung und Steuerungssystemen
Die Ausgangssignale der IMU werden in zwei Kanäle aufgeteilt, um unterschiedliche Verarbeitungsanforderungen zu erfüllen:
- EtherCAT-Nachrichten für Motorantriebe: Die Signale der IMU werden über einen IO-Block in eine EtherCAT-Nachricht umgewandelt und direkt an die Antriebe der Schwebemotoren gesendet. Diese Signale liefern Echtzeitdaten für die Steuerung der Position des Pods (Neigung, Gieren und Rollen) sowie für die Dämpfung und Anpassung der vertikalen und seitlichen Kräfte.
- Teensy 4.1 ADC für die Standortverfolgung: Der zweite Signalausgang wird in ein 0V-3,3V-Differenzsignal umgewandelt, das in einen Teensy 4.1-Mikrocontroller eingespeist wird. Durch die Verwendung der Endgeschwindigkeit des Pods, die in den Spurwechsel einfließt, helfen die IMU-Daten bei der iterativen Berechnung der Position des Pods während der Kurve. Dieser zweite Kanal befindet sich noch in der Entwicklungs- und Testphase.
- Erweiterte Filterung mit Kalman-Integration: Um genaue Daten zu gewährleisten, werden die IMU-Signale durch einen komplementären Filter verarbeitet und in einen erweiterten Kalman-Filter (EKF) integriert, der die Leistung der Steuerungssysteme des Pods verbessert. Der EKF trägt dazu bei, externe Störungen, wie z. B. die vom Motor ausgehenden Kräfte, abzuschwächen, und ermöglicht im Vergleich zu herkömmlichen PID-Regelkreisen eine schnellere Unterdrückung dieser Störungen. Die hohe Empfindlichkeit der IMU (z. B. statische Geräuschpegel von 150 µrad/s für Kreisel) ermöglicht es dem System, schnell und präzise auf alle Schwankungen im Verhalten des Pods zu reagieren.
Bitte akzeptieren Sie die Marketing-Cookies, um dieses Video aufrufen zu können.
Für die Anpassung Ihrer Zustimmung, bitte hier klicken.
Verbesserte Stabilität und Kontrolle
Die Integration der IMU von Althen hat die Leistung der Kapsel bei der Bewältigung der seitlichen elektromagnetischen Aufhängungskräfte (EMS), die von mehreren komplexen Faktoren beeinflusst werden, erheblich verbessert. Die schnelle Reaktion der IMU ermöglichte es dem Delfter Hyperloop-Team, seine Steuerungssysteme zu verfeinern und sich auf das anspruchsvolle Spurwechselmanöver vorzubereiten.

Unterstützung und zeitnahe Integration
Die schnelle Unterstützung und Kommunikation von Althen war für das Delft Hyperloop Team von unschätzbarem Wert. Angesichts der knappen Fristen für die European Hyperloop Week war die rechtzeitige Integration der IMU entscheidend. Die Partnerschaft ermöglichte es dem Team, den Sensor rechtzeitig vor dem Wettbewerb zu implementieren, zu testen und fein abzustimmen, was die Chancen, den ersten schwebenden Spurwechsel in einer Hyperloop-Kapsel erfolgreich durchzuführen, erheblich erhöhte.
Eine unverzichtbare Komponente
Die IMU8.x.y ist zu einer unverzichtbaren Komponente des Spurwechselsystems des Delft Hyperloop geworden. Sie liefert die Sensordaten, die zur präzisen Steuerung der Position, der Ausrichtung und der Kräfte des Pods während dieses komplexen Manövers benötigt werden. Wenn Sie mehr darüber erfahren möchten, wie Althen zusammen mit ASC maßgeschneiderte Inertialmesslösungen für Ihre Projekte anbieten kann, oder wenn Sie Ihre spezifischen Anwendungsanforderungen besprechen möchten, kontaktieren Sie unser Team noch heute. Wir helfen Ihnen gerne, die perfekte Sensorlösung für Ihre Herausforderungen zu finden!
Was ist Ihr Projekt?
Sprechen Sie mit unseren Experten
Benötigen Sie einen maßgeschneiderten Sensor für Ihr Projekt oder Ihre Anwendung? Kontaktieren Sie uns!