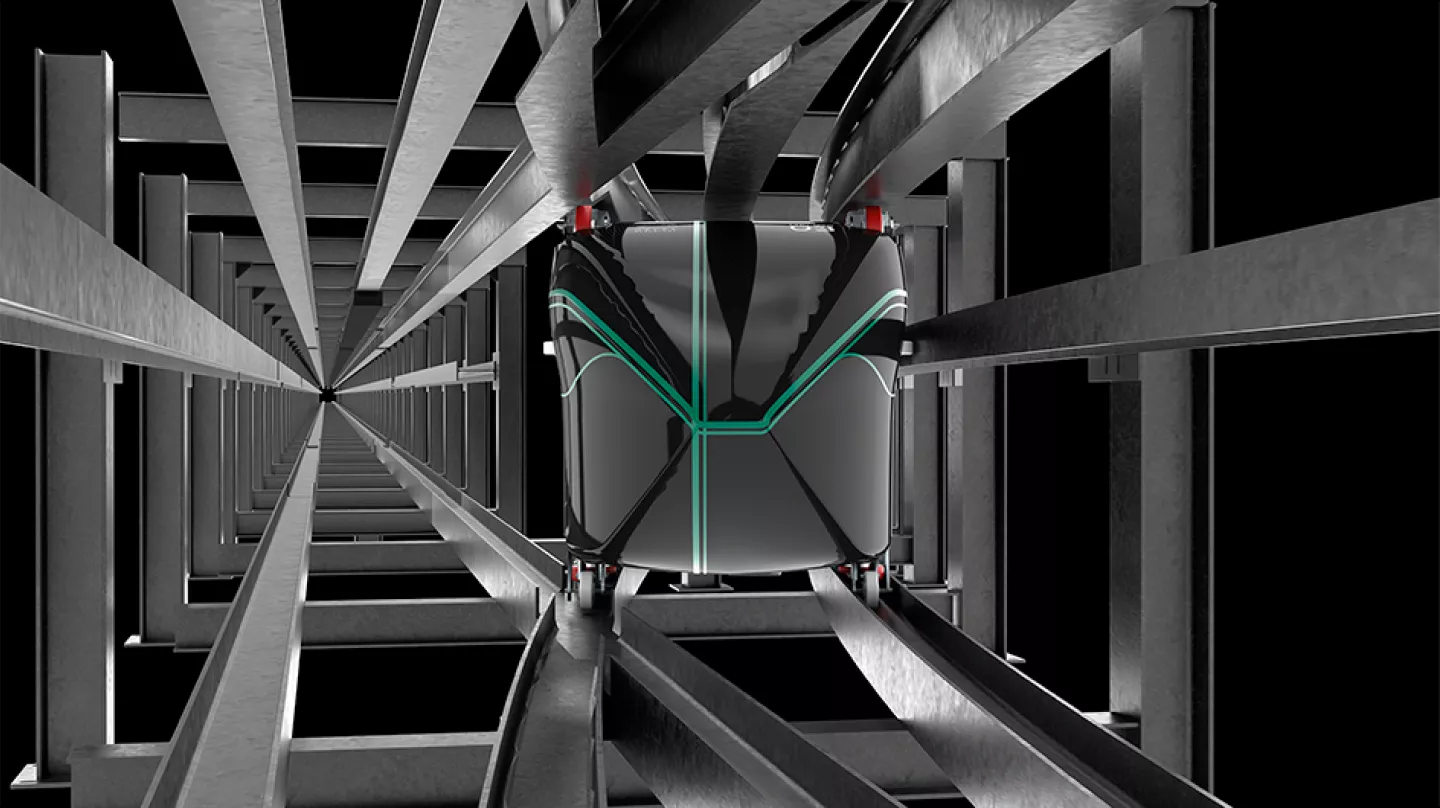
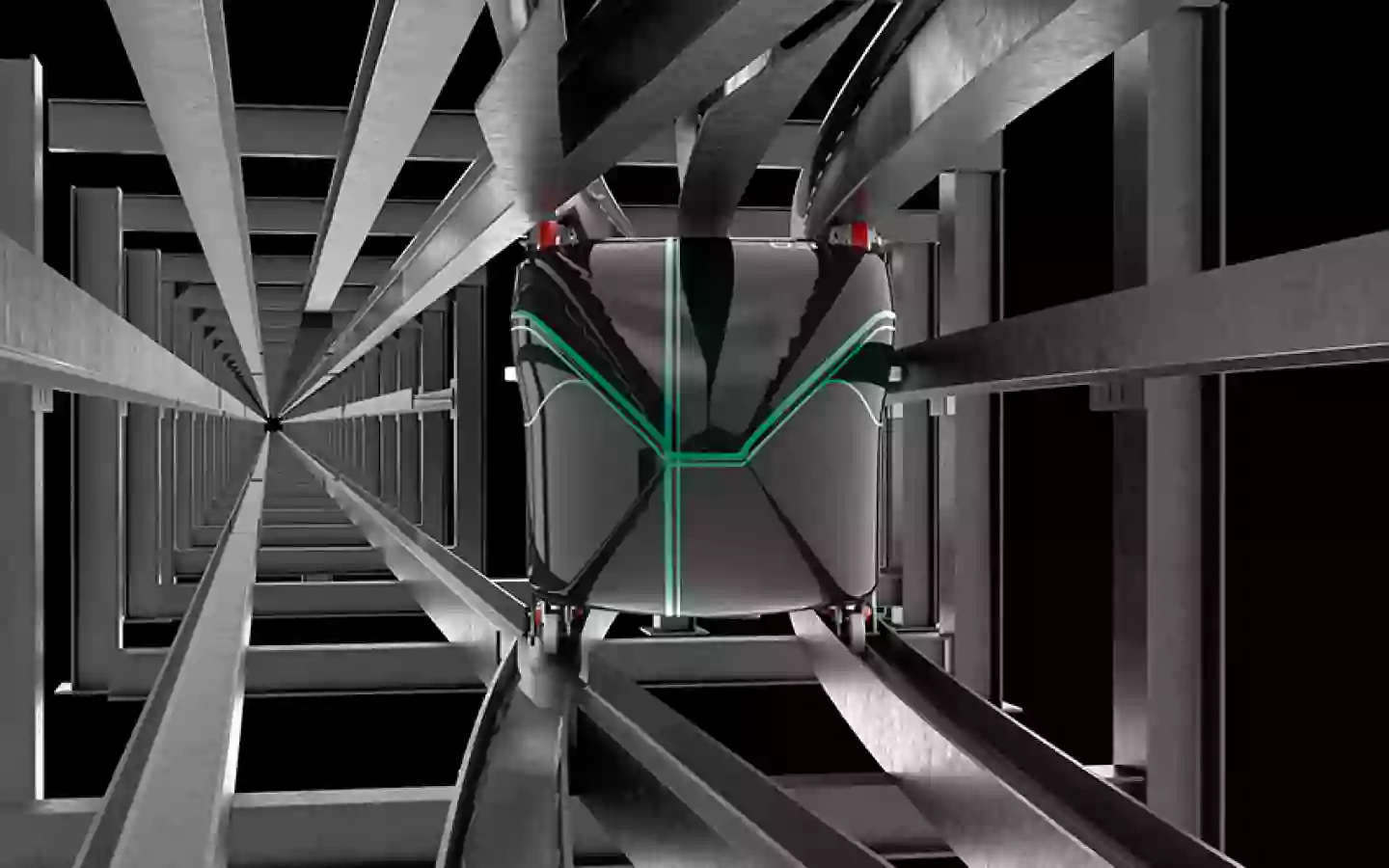
Controle tijdens de levitating lane-switch van de pod
Centraal in het behalen van deze mijlpaal staat de integratie van Althens IMU8.x.y inertial measurement unit (IMU), een essentiële sensor voor de nauwkeurige besturing van de hyperloop pod tijdens de lane-switch manoeuvre.
Tijdens de baanwisseling van de hyperloop pod is het van cruciaal belang om de pod te controleren en te stabiliseren. Deze manoeuvre omvat het navigeren over een gedeelte van de baan waar de pod levitatie en de juiste oriëntatie moet behouden terwijl deze de laterale en verticale balken kruist. In dit gebied verliest het gebruikelijke optische lokalisatiesysteem zijn effectiviteit, wat een uitdaging is voor het handhaven van de stabiliteit en controle van de pod.
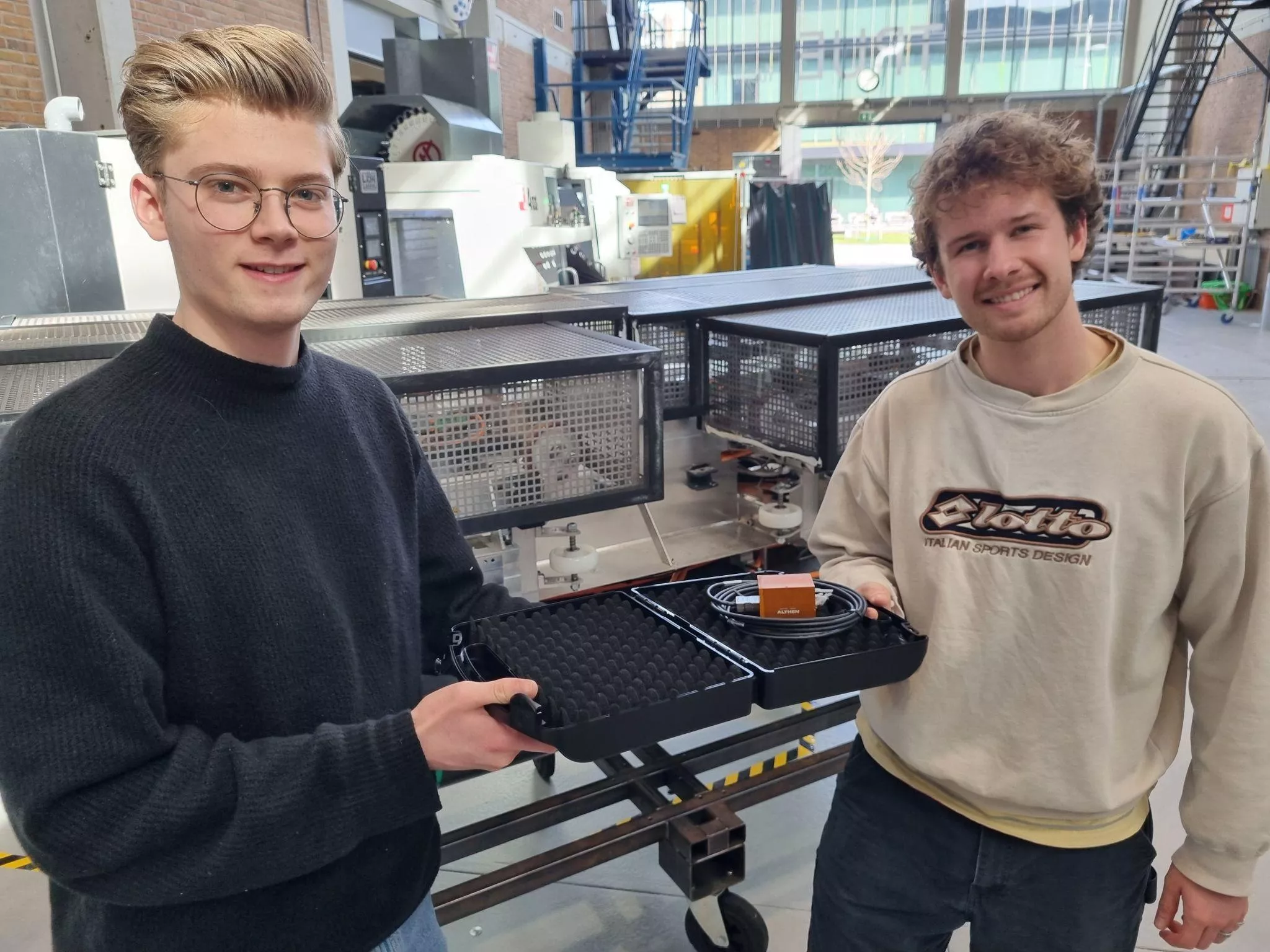
Over de ASC IMU 8.X.Y
De ASC IMU 8.X.Y is een uiterst nauwkeurige traagheidsmeeteenheid (IMU), ontworpen met MEMS-versnellingsmeters en gyroscopen. Deze eenheid biedt 6 vrijheidsgraden, uitstekende biasstabiliteit en zowel een laag geluidsniveau als hoge schokbestendigheid. Het modulaire ontwerp maakt het geschikt voor diverse toepassingen, zoals automatisch geleide voertuigen, robotica en spoorwegsystemen. Dankzij de lichtgewicht aluminium behuizing met IP65-classificatie en aanpasbare kabelopties, garandeert de ASC IMU 8.X.Y betrouwbare prestaties onder zware omstandigheden, waardoor deze perfect is voor projecten die precieze positionering en navigatie vereisen.
De sleutel tot succes
Om de stabiliteit en controle van de pod te waarborgen, koos Delft Hyperloop voor Althen en ASC met de IMU8.x.y, een uiterst nauwkeurige inertial measurement unit. Deze IMU werd geïntegreerd voor verschillende cruciale functies de lane-switch:
Precieze lokalisatie van de pod
Het optische lokalisatiesysteem kan de pod en het spoor kwijtraken tijdens het bundelovergangssegment, waardoor de IMU de positie van de pod tot op 5 cm nauwkeurig moet inschatten gedurende maximaal 10 seconden. Dit is cruciaal om ervoor te zorgen dat de pod op koers blijft tijdens deze belangrijke fase van de wissel.
Monitoring van de oriëntatie van de pod
De IMU detecteert en meet zelfs de kleinste veranderingen, yaw en roll van de pod. Deze metingen zijn essentieel voor het handhaven van stabiliteit ten opzichte van de balken, zodat de pod soepel blijft zweven zonder onverwachte afwijkingen.
Krachtschatting voor demping van oscillaties
De IMU speelt een sleutelrol bij het inschatten van de verticale kracht die door de magnetische motor van de pod wordt uitgeoefend. Dit stelt het team in staat om ongewenste schommelingen te dempen die kunnen optreden tijdens de lane-switch, wat essentieel is voor het behouden van een stabiele levitatie en het voorkomen van verstoringen.
Centrifugale kracht schatting
Door nauwkeurige metingen van de middelpuntvliedende kracht helpt de IMU bij het bepalen van de optimale stroom die tijdens de bocht moet worden toegepast, zodat de pod veilig en efficiënt door de lane-switch kan navigeren.
De integratie van de inertial measurement unit heeft de prestaties van de pod aanzienlijk verbeterd bij het beheersen van de laterale elektromagnetische ophangingskrachten (EMS), die door verschillende complexe factoren worden beïnvloed. Dankzij de snelle respons van de IMU konden wij onze besturingssystemen optimaliseren en ons voorbereiden op de uitdagende lane-switch manoeuvre.

Signaalverwerking en integratie van besturingssystemen
De uitgangssignalen van de IMU worden gesplitst in twee kanalen voor verschillende verwerkingsbehoeften:
- EtherCAT-berichten voor motoraandrijvingen: De signalen van de IMU worden via een IO-blok omgezet in EtherCAT-berichten en direct naar de aandrijvingen van de levitatiemotoren gestuurd. Deze signalen leveren real-time gegevens voor het positioneren van de pod (pitch, yaw en roll) en voor het dempen en aanpassen van verticale en laterale krachten.
- Teensy 4.1 ADC voor plaatsbepaling: De tweede signaaluitgang wordt omgezet in een 0V-3,3V differentieel signaal dat wordt ingevoerd in een Teensy 4.1 microcontroller. Door gebruik te maken van de eindsnelheid van de pod bij het lane-switching, helpt de IMU-data bij het iteratief berekenen van de locatie van de pod tijdens het nemen van een bocht. Dit tweede kanaal is momenteel in ontwikkeling en wordt nog getest.
- Geavanceerde filtering met Kalman-integratie: Om nauwkeurige gegevens te waarborgen, worden de IMU-signalen verwerkt door een complementair filter en geïntegreerd in een uitgebreide Kalman-filter (EKF), wat de prestaties van de regelsystemen van de pod verbetert. De EKF helpt externe verstoringen, zoals motorinvloeden, te verminderen en zorgt voor een snellere afwijzing van deze verstoringen vergeleken met traditionele PID-regelkringen. Dankzij de hoge gevoeligheid van de IMU (bijvoorbeeld statische ruisniveaus van 150 µrad/s voor gyroscopen) kan het systeem snel en nauwkeurig reageren op variaties in het gedrag van de pod.
Accepteer de marketing cookies om deze video te bekijken.
Klik hier om uw toestemming te wijzigen.
Resultaten: verbeterde stabiliteit en controle
De integratie van Althens IMU heeft de prestaties van de pod aanzienlijk verbeterd bij het beheren van laterale elektromagnetische ophangingskrachten (EMS), die door verschillende complexe factoren worden beïnvloed. Dankzij de snelle respons van de IMU kon het Delft Hyperloop-team hun besturingssystemen verfijnen en zich optimaal voorbereiden op de uitdagende lane-switch manoeuvre.

Ondersteuning en integratie
De snelle ondersteuning en heldere communicatie van Althen waren van onschatbare waarde voor het Delft Hyperloop-team. Met strakke deadlines voor de Europese Hyperloop Week was een tijdige integratie van de IMU cruciaal. Dankzij deze samenwerking kon het team de sensor net op tijd voor de wedstrijd implementeren, testen en afstellen, wat hun kansen om als eerste een levitating lane-switch in een hyperloop pod te realiseren aanzienlijk vergrootte.
Een onmisbaar onderdeel
De IMU8.x.y is een cruciaal onderdeel geworden van het lane-switch systeem van de Delft Hyperloop. Deze sensor levert de gegevens die nodig zijn om de locatie, oriëntatie en krachten van de pod nauwkeurig te reguleren tijdens complexe manoeuvres. De IMU speelt een essentiële rol in het verleggen van de grenzen van wat mogelijk is in de toekomst van transport.
Voor meer informatie over hoe Althen, samen met ASC, op maat gemaakte traagheidsmeetoplossingen kan bieden voor uw projecten, of om uw specifieke toepassingsbehoeften te bespreken, neem vandaag nog contact op met ons team. Wij helpen u graag bij het vinden van de ideale sensoroplossing voor uw uitdagingen.
Ideeën of vragen
Wij zijn benieuwd naar uw project en meetuitdaging
Heeft u een sensor op maat nodig voor uw project of toepassing? Neem dan contact met ons op.